复杂低空无人机飞行冲突网络建模与精细管理研究
一、研究背景
无人机融入国家空域系统已成为大势所趋,将对公共运输航空、军事航空等空域有人机运行产生重大影响。与传统的航空交通管理相比,无人机运行在模式、载具、空域、规则和场景等方面存在诸多差异,其安全运行管理问题成为全球航空领域的关注焦点和研究难点。根据欧美、中国等国家和地区发布的无人机运行指导文件,无人机空管将与传统空管保持协同发展,按照“隔离运行→过渡运行→融合运行”的总体发展思路,最终实现国家空域系统多类型用户一体化飞行。

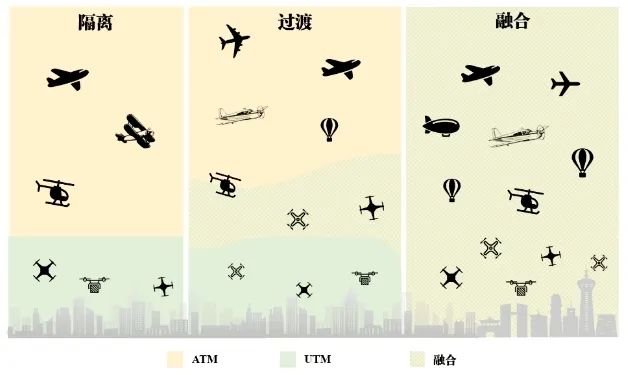
图1 无人机空管与传统空管协同发展示意
当前,国内外尚未建立成熟的民用无人机低空飞行冲突感知与避让防撞系统,无人机与有人机在同一空域内混合飞行的条件尚不成熟,已有研究大多聚焦隔离运行模式,无法满足未来的过渡运行和融合运行需求。针对未来无人机规模化应用和密集化飞行带来的安全问题,如何从集群视角对无人机飞行冲突网络进行科学建模,进而准确提取网络冲突多维特征,科学揭示网络冲突演化特性,最终实现网络冲突优化调配,成为亟待解决的关键科学难题。
二、研究亮点
1)针对低空无人机群体飞行冲突的网络时空演化特性难以准确捕捉的问题,构建了基于冲突连边动态识别的无人机飞行冲突网络模型,设计了多维度的无人机飞行冲突网络特征指标集,分析了无人机群体飞行冲突的网络动态演化特性,实现了任意低空空域系统内无人机群体飞行冲突的动态识别以及冲突网络特征提取,弥补了传统研究在无人机网络化群体行为特征识别方面的不足。
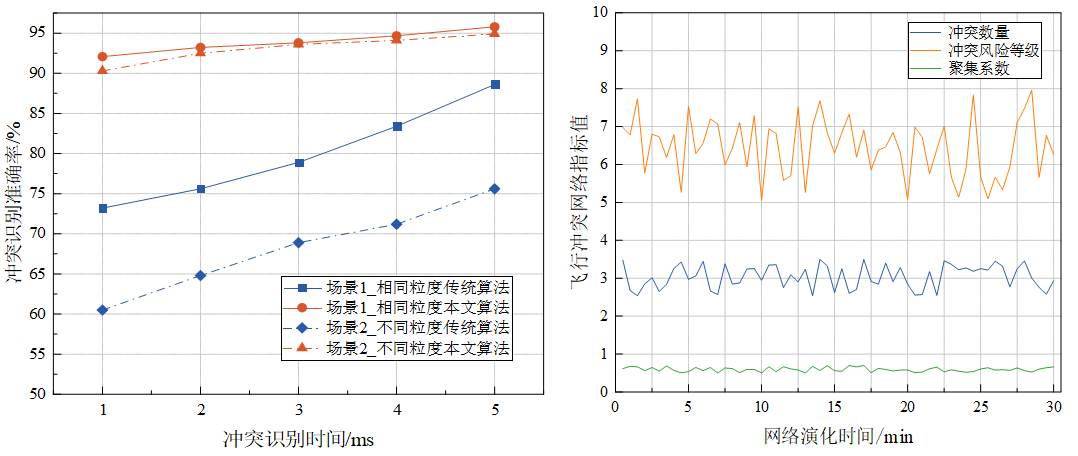
图2 基于个体冲突精准识别的群体冲突网络演化分析
2)针对传统无人机冲突探测面向预设的粗放空域单元导致精细化管理水平低下的问题,提出了离散栅格框架下的低空空域数字栅格剖分与编码设计方法,建立了基于数字栅格的无人机飞行冲突精细探测模型,与速度障碍法、基于Reich模型的成对比较算法相比,所提方法有效增强了高密度飞行环境下无人机冲突探测效率,可将不同飞行量下的冲突探测时间由“指数增长级”降至“线性增长级”。
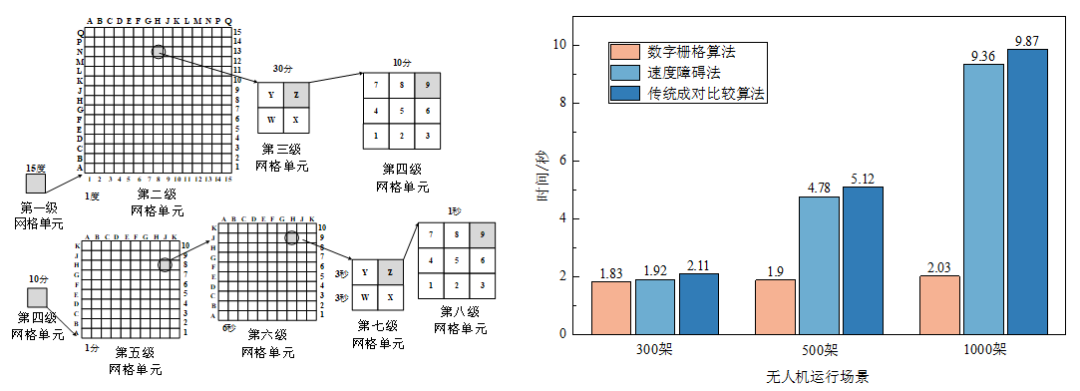
图3 基于数字栅格的无人机飞行冲突精细探测
3)针对当前无人机冲突解脱策略单一固化、偏重个体且效果不佳的问题,综合考虑无人机冲突数量和运行成本等利益需求,设计了高度改变、水平航迹偏移和速度改变等无人机冲突解脱组合策略集,建立了考虑优先级的无人机冲突解脱混合整数优化模型及多目标进化算法,与不考虑优先级的方法相比,所提方法可将无人机高度层、水平航迹和速度调整值分别减少32.8%、21.4%和14.6%。
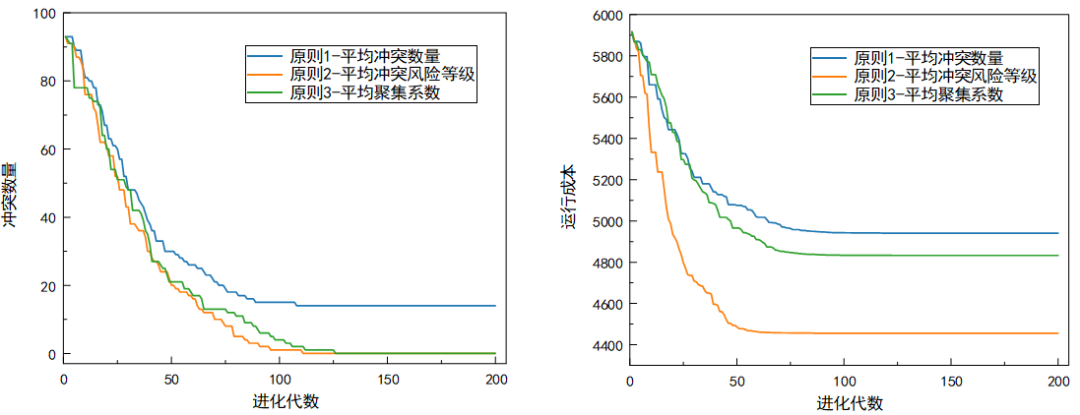
图4 不同优先级原则下无人机冲突数量和运行成本对比
4)目前,本文提出的部分研究方法已实现技术落地转化应用,支撑了南京智慧低空服务管理平台的研制,服务于我国首批国家级民用无人驾驶航空试验区建设运行,并在长江大保护、海事巡查、城市治理等无人机应用中取得显著成效。
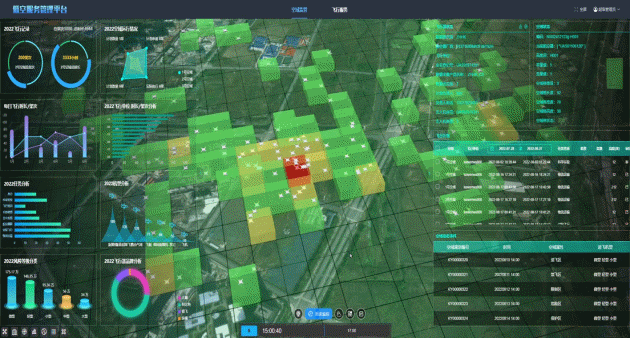
图5 研究成果在国家级无人机试验区落地转化应用
三、研究结论
本文针对多元化空域、高密度流量和高动态演化交织形成的复杂低空系统,构建了基于冲突连边动态识别的无人机飞行冲突网络模型及特征度量方法,提出了基于数字栅格的无人机飞行冲突精细探测算法,建立了考虑优先级的无人机飞行冲突最优解脱方法,实现了低空空域内无人机飞行冲突的精细化管理,研究成果可为低空空域安全管理与无人机运行风险防控提供理论支撑和方法指导。