微纳扑翼飞行器前沿动态综述与启示建议 (下)
3 微纳扑翼飞行器的关键技术
3.1 结构设计
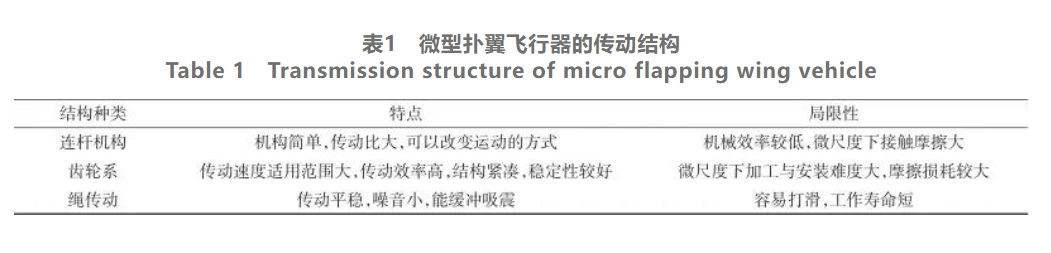
扑翼飞行器主要通过仿生和宏观机械结构微型化的方式进行结构设计,在设计中主要模仿对象是扑翼飞行的鸟类和昆虫,在传动机构方面主要以连杆结构[25-26]、齿轮系[27-29]以及绳传动[30]为主,如表1所示。
表1 微型扑翼飞行器的传动结构
Table 1 Transmission structure of micro flapping wing vehicle
2015年,韩国建业大学的 Park 等通过对甲壳虫的运动进行研究仿照[25],研制出一款微型扑翼飞行器,如图7(a)所示,利用曲柄滑块机构作为扑翼飞行器的传动机构,将驱动机构的旋转运动放大输出为翅膀的拍打运动。2016年,哈佛大学微型机器人实验室模仿鸟类飞行成功研制出一款质量为3.2 g的无线扑翼微飞行器[26],如图7(b)所示。机器人采用一对镜像对称曲柄滑块和附加连杆组成的Sarrus连杆作为传动机构,该款飞行器既能主动扑翼飞行又能被动滑翔飞行。
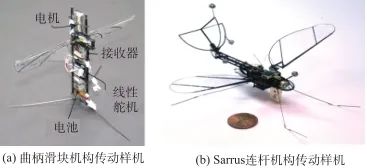
图7 连杆滑块机构传动的微型扑翼飞行器
Fig.7 Vector diameter variation diagram
普渡大学[27-28]于2016年成功研制出仿蜂鸟微型扑翼机器人,如图8(a)所示,该机器人采用高效减速齿轮系传动,质量约12 g,可实现无线起飞。国内西北工业大学研制的一款仿生扑翼飞行器[29],如图8(b)所示,该仿生飞行器采用齿轮系统作为传动机构,全机质量为15 g,翼展20 cm,实现成功飞行8~18 s。
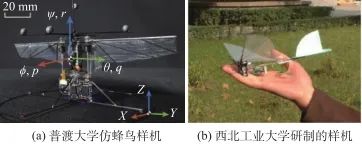
图8 齿轮系传动的微型扑翼飞行器
Fig.8 Miniature ornithopter driven by gear train
2011年,美国航空环境公司[30]研制出仿蜂鸟机器人Nano Hummingbird,如图9所示,该机器人采用齿轮与绳传动相结合的方式,质量为19 g,翼展16.5 cm,扑翼频率30 Hz,可无线遥控飞行约4 min。
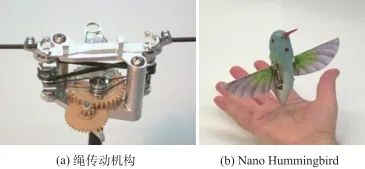
图9 绳传动的仿蜂鸟扑翼飞行器
Fig.9 A rope-driven hummingbird imitation flapping wing vehicle
3.2 加工工艺
微型扑翼飞行器的加工工艺主要有激光切割与微装配[31]、智能复合微结构工艺(Smart Composite Microstructure,SCM)与pop-up工艺[32-35]、MEMS技术[36-38]等,如表2所示。
表2 微型扑翼飞行器的加工工艺
Table 2 Processing technology of micro flapping wing vehicle

激光切割与微装配工艺是制造微型机器人比较常用且经典的手段。2011年,卡耐基梅隆大学的 Hines 等[31]通过仿生研制出一款微型扑翼飞行器,如图10所示,该飞行器采用激光切割分别加工出翅膀和机身等结构,最后再进行微装配实现样机成型,样机质量约705 mg,未成功实现起飞。
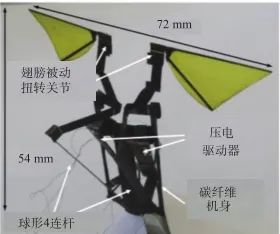
图10 卡耐基梅隆大学研制的样机
Fig.10 A prototype developed at Carnegie Mellon University
加利福尼亚大学伯克利分校从1998年开始采用SCM加工工艺研制微型扑翼飞行器MFI[32-33],如图11(a)所示。但受微细加工技术与飞行原理的限制,MFI未实现稳定飞行。2012年哈佛大学基于SCM工艺提出了一种整体制造扑翼飞行器的pop-up工艺[34-35],采用该工艺制得了一款质量为90 mg的微型扑翼飞行器,如图11(b)所示。
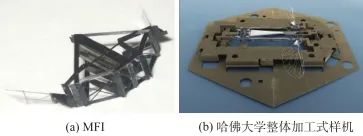
图11 采用SCM工艺研制的扑翼飞行器
Fig.11 An ornithopter developed by SCM technology
法国的里尔大学研发了一款微型扑翼飞行器[36],如图12(a)所示,该飞行器的翅膀和机身是基于MEMS工艺,采用SU-8光刻胶制造获得的,翼展3.5 cm,质量为22 mg,实现60°的扑翼角度。国内上海交通大学基于MEMS技术,采用SU-8光刻胶制作了一款扑翼飞行器[37-38],如图12(b)所示。
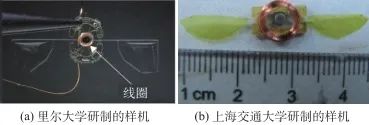
图12 采用MEMS技术研制的扑翼飞行器
Fig.12 An ornithopter developed by MEMS technology
3.3 能源驱动
在微型扑翼飞行器的驱动方面,主要以电机驱动[39-43]、电磁驱动[44-47]和压电驱动[48-56]为主,近些年一些机构还提出了一些新型驱动方式,如混合驱动[57]、介电弹性体驱动[58-59]等,如表3所示。
表3 微型扑翼飞行器的驱动方式
Table 3 The driving mode of micro flapping wing vehicle

加州理工学院于1998年开始研制微型扑翼飞行器MicroBat[39-40],研制的样机如图13(a)所示,采用质量约3 g可充电镍镉电池供电,利用微型电机驱动,实现最佳无线飞行时间42 s。代尔夫特大学于2005年开始研制DelFly系列扑翼飞行器[41-43],如图13(b)所示,采用微型无刷电机驱动,微型锂电池供电。
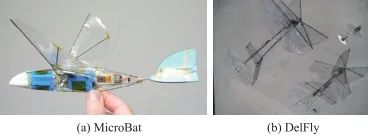
图13 电机驱动的微型扑翼飞行器
Fig.13 Motor driven micro flapping wing vehicle
2013年美国普渡大学生物机器人实验室开始研制一种用于高频扑翼的电磁驱动器[44],如图14(a)所示,并于2015年采用电磁驱动器研制出一款质量为2.6 g的扑翼飞行器[45],并实现样机的成功起飞。国内上海交通大学研究团队于2016 年研制出一款电磁驱动扑翼机器人[46-47],如图14(b)所示。该机器人的质量为80 mg,翼展为 35 mm,采用电磁驱动控制,是当时公开报道的最小的电磁驱动扑翼机器人。
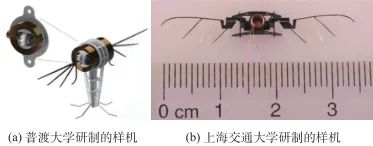
图14 电磁驱动的微型扑翼飞行器
Fig.14 Electromagnetic driven micro flapping wing vehicle
哈佛大学Wood团队于2007年研制出世界上首款成功起飞的压电驱动微型扑翼飞行器HMF[48-49],采用PZT-5系列压电片作驱动器,质量为60 mg,翼展30 mm;该团队通过对HMF的改进,研制了运动解耦式扑翼飞行器Robobee[50-53],质量为80 mg,翼展30 mm,可多自由度运动,并采用太阳能供电[54],于2019年实现脱线起飞,如图15(a)所示。2018年,华盛顿大学的Yogesh等研制了一款压电驱动微型扑翼飞行器RoboFly[55],该款机器人采用横向布置驱动机构,如图15(b)所示,并通过使用激光器远程供电[56]实现了无线起飞。
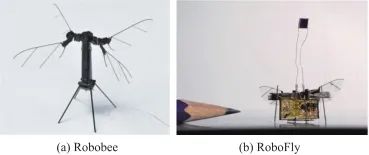
图15 压电驱动的微型扑翼飞行器
Fig.15 Piezoelectric driven micro flapping wing vehicle
哈佛大学的陈宇峰[57]在Robobee的基础上改进,给飞行器添加了集气室、四个平衡梁、浮力支腿以及相关电化学设备,如图16(a)所示,该款飞行器采用压电、浮力和爆破力的混合驱动方式,可实现水中浮游、冲出水面和继续飞行三种功能。2019 年,该团队还采用介电弹性体执行器(DEA)[58]驱动,研制了一款鲁棒性较好的微型扑翼飞行器[59],如图16(b)所示。2021年丰田中央研究所报道了一种新型无线射频电源[60],可用于驱动昆虫仿真扑翼飞行器。其功率质量比密度为4900 W/kg,比等质量的锂聚合物电池高出5倍,并利用该系统,演示了1.8 g飞行器的无线起飞,如图16(c)所示。2022年,布里斯托大学开发了一种液体放大拉链执行器(LAZA)驱动的微飞行器[61],如图16(d)所示,飞行器机翼带有负电荷,机翼周围有电介质液体,正电荷交替转移到机翼两侧的壁上,使机翼摆动,翼展50 mm,飞行器最大速度 18 个身长每秒,功耗243 mW。
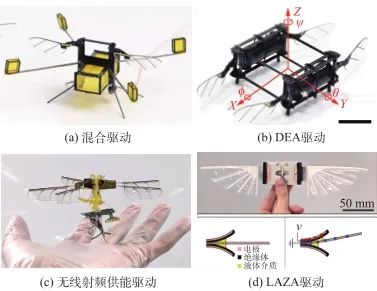
图16 其他驱动方式的扑翼飞行器
Fig.16 Ornithopter vehicle with other modes of drive
3.4 系统级能力
微纳扑翼飞行器作为一个完整的机器人系统,其携带载荷的能力和续航时间是其未来投入应用的重要技术指标要求,当前研制的微纳扑翼飞行器主要分为仿蜂鸟型和仿飞行昆虫两类,其中仿蜂鸟型的微纳扑翼飞行器具有一定的载荷和续航能力,但其体积和质量较大,通常质量达数十克,翼展通常超过10 cm,仿飞行昆虫类的微纳扑翼飞行器体积和质量小,但其基本无负载能力和续航能力。
如美国航空环境公司研制出的Nano Hummingbird仿蜂鸟微型扑翼机器人[30],该机器人质量为19 g,翼展16.5 cm,扑翼频率30 Hz,可无线遥控飞行约4 min,西北工业大学的宋笔峰团队设计的信鸽,质量约为200 g,翼展大约为50 cm,最大的飞行速度可达40 km/h,最长的续航时间为30 min,装备了高清的摄像头和GPS天线以及飞行控制系统和卫星通信链。
哈佛大学仿蜜蜂微飞行器RoboBee X-wing[54]和华盛顿大学的仿蜜蜂微飞行器RoboFly[56]均采用光能供电实现毫克级扑翼微飞行器的无缆起飞,但受能源和质量限制,此类飞行器目前的负载能力和续航能力较弱。
未来投入应用的微纳扑翼飞行器通常质量为500 mg~10 g之间,尺寸在1~10 cm之间,这样的尺寸范围既保证机器人具有极高的隐蔽性,又能够搭载一定功能载荷,如图像探测、录像录音等功能,飞行高度需达3~5 m,飞行速度应与蜜蜂、蜻蜓等昆虫相仿,同时需要具备一定续航能力,持续工作时间需达数十分钟。目前所研制的微纳扑翼飞行器在系统级能力上尚未达到要求。
4 微纳扑翼飞行器发展挑战与应用
4.1 发展态势挑战
虽然微纳扑翼飞行器在设计方案、加工工艺、驱动方法、系统集成、感知与控制等方面取得了一系列进展,但距离实用化仍然有一定距离,主要面临以下技术挑战:
(1)微纳扑翼飞行器需要全新的设计方案,当前的微纳飞行器在技术路线和结构设计方案上限制了其进一步微型化和集成化,且噪声较大,在较安静的室内环境易暴露;
(2)微纳扑翼飞行器对仿生“功构一体”智能材料与结构的需求迫切,现有微纳飞行器的材料和结构通常功能有限,为了增加其功能需要叠加使用,制造组装过程复杂,与微纳飞行器苛刻的体积和质量限制产生根本矛盾;
(3)微纳扑翼飞行器对智能化感知与信息处理系统的集成化程度提出了苛刻要求,微纳飞行器既包含智能信息处理算法的软件集成,又包含机械、能源、传感等多个模块的高度硬件集成,是对当前微机电系统制造能力与综合集成能力的巨大挑战;
(4)微纳扑翼飞行器对高效率仿生能源供给与转换装置提出了迫切需求,微型化对能源的能量密度以及能源转换装置的转换效率都有比较高的要求,现有能源存储与转换方法难以满足要求;
(5)微纳扑翼飞行器的自主感知与集群控制难以实现,目前绝大多数微纳飞行器均只包含运动机构,其姿态测量和信息处理系统通常在超微机器人外部,更无法携带相关感知和探测载荷,主要原因是体积和功耗约束下负载能力极为有限,感知系统集成化程度低,要实现自主感知与集群控制非常困难。
4.2 应用潜力
相比于传统无人飞行平台,微纳扑翼飞行器具有体积微小、隐蔽性强、灵活度高等显著优点,开展微型扑翼飞行器的技术研究,具有以下几个方面的重大研究价值。
(1)微纳扑翼飞行器具有体积小、噪声低、运动灵活等优异特性,将极大提升隐蔽渗透侦察能力。可以多种渠道投放至敌区执行侦察,还可以依附于敌方的车辆、人员等载体渗透进入敌方内部,实现“无孔不入,无处不在”,获取常规手段难以得到的情报信息。
(2)微纳扑翼飞行器可依托于先进微纳制造工艺,实现低成本批量化的制作。单一机器人的负载能力有限,监测和攻击能力受限于携带载荷的种类和承载能力,集群化可以有效地提高微飞行器的攻击能力。此外,集群化的微飞行器通过构建区域网,批量投放至战场,可实现对战场态势的全天候监视。
(3)跨尺度的无人平台组合将是未来微型机器人应用的重点研究方向。微纳扑翼飞行器与传统无人平台优势互补,促进无人装备跨尺度融合发展,能充分发挥无人平台在未来战争中的效力。微飞行器载荷能力与续航能力有限,适合近距离的侦察、情报获取和定向攻击等任务,可用于补充中小型无人平台由于体积限制无法执行作战任务的场景,提升无人平台综合作战能力,促进无人平台多尺度体系能力的快速形成。
(4)在民用方面,微纳扑翼飞行器的应用潜力也是十分巨大。在智能检测方面,可广泛运用于农、林、牧、渔以及一些工业生产的巡检、安全保障等方面;还可用于复杂未知环境中的勘探、地图的测绘、考古以及灾后救援等。
5 微纳扑翼飞行器发展建议
聚焦我国未来在智能无人系统领域的发展需求,结合当前微纳飞行器在结构设计、加工工艺、能源驱动方法以及运动控制等方面所面临的挑战,给出了微纳飞行器未来发展的研究建议。
(1)体积超微型化
微纳机器人的核心优势就是体积小和质量轻,所以在微纳飞行器未来的发展中,需要牢牢把握这一点,研发出超微型的微纳飞行器,利用其极强的隐蔽性优势,在一些特殊环境(如战场、跟踪罪犯等)中灵活隐蔽地完成侦察、监听等任务。
(2)加工制造批量化与智能化
微纳机器人的另一个优势是单个机器人的材料成本普遍远低于大尺寸机器人,因此需要研发出针对微纳飞行器的批量化制造工艺,大幅度降低微纳飞行器的制造成本,同时加工过程应更加智能化,工艺流程、加工进度以及加工精度的控制应符合智能制造的要求,使智能微纳飞行器能更快投入生产应用。
(3)结构功能仿生化
围绕仿生结构“可自愈、自生长、自组织、自进化”的应用需求,构建用于提升微纳飞行器系统仿生功能的智能化综合平台,使结构设计和成型更加智能化,同时使微纳飞行器仿生优势进一步拓宽。
(4)供能驱动高效智能化
研发能量密度更高的能源,或是通过飞行器智能实时调节自身功耗来延长机器人的持续工作时间;研发更高效更智能的驱动方式来提高微纳飞行器的负载、运动以及续航能力。
(5)控制智能集群化
用于宏观环境下作业时,通常需要数个微纳飞行器合作完成任务,类似于蜂群,在单个微纳飞行器运动控制的基础上,通过布置多个微纳飞行器进行集群控制与协同控制,实现群体间的紧密合作;还可以通过对微纳飞行器分组搭载不同的传感器,进行信息的交流和综合,实现协同态势感知和信息共享,进而进行群体智能决策。
6 结束语
随着计算机集成技术、材料科学、空气动力学、微纳制造技术与人工智能技术的不断进步,微纳扑翼飞行器的研究已经取得一定的成果,但在微纳扑翼飞行器的高集成度、无线高效驱动、微型高密度能源供应、自主感知以及集群控制等方面仍有巨大的发展空间,未来微纳扑翼飞行器的发展与应用呈现以下趋势:(1)微型化,其核心是利用尺度优势,来提高其隐蔽性与战场适应性;(2)集成化,在单个飞行器上集成多种传感器与执行器,使飞行器多功能化,能够完成多种作战任务;(3)智能集群化,通过控制手段,使飞行器群体能自主地、高效协同地完成作战任务,合作完成单个飞行器无法完成的特殊任务(如联合侦察、集体杀伤目标、战场搜救等);(4)能量致密化,研发能量密度更高的能源,或是通过降低飞行器的功耗来延长其持续工作的时间;(5)驱动高效化,研发更高效的驱动方式来提高微飞行器的负载和续航能力;(6)生产批量化,通过开发微加工工艺来实现飞行器的批量生产化,以降低制造成本。